ROS路由状态查看0.5
Submitted by 熊茂祥 on 2012, February 23, 1:02 PM. ROS
ROS路由状态查看0.5
更新时间:2012/2/23
更新内容:调整了延时值,判断参数,加强程序稳定性。修改了配置界面,将IP和配置界面放在一起方便调试。修正了账号密码错误时不断弹出错误提示的BUG。
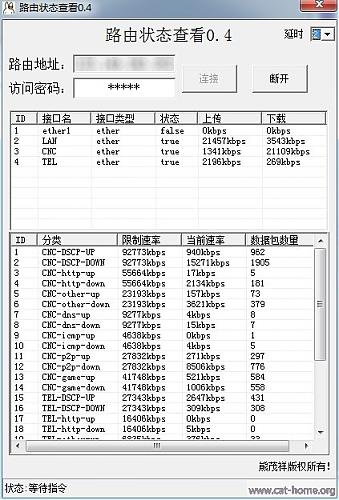
ROS路由状态查看0.4
更新时间:2011/12/14
更新内容:调整了延时值,添加了查看QUEUE TREE内限速状态。
ROS路由状态查看0.3
更新时间:2011/11/24
更新内容:修正了配置服务后必须关闭程序再打开才能正常使用的BUG。调整了执行细节,以加快获取速度和降低获取数据出错的概率。
ROS路由状态查看0.2
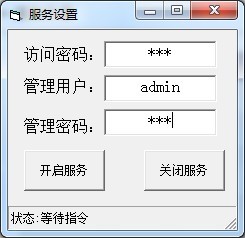
功能简介:可以在不告知终端用户ROS账号密码的情况下方便终端用户查看ROS内的各接口状态。打开程序后按F12进入服务配置界面。必须配置开启服务后方可正常使用。
操作说明:先运行压缩包内的2个控件程序进行安装。配置服务请按F12进入。
不多说上图说明一切。目前本程序公开免费提供。
图片附件:
图片附件(缩略图):
附件: 路由状态查看0.5.rar (602.66 K, 下载次数:4584)
Tags: ros, 状态, 查看, api, 流量
« 上一篇 | 下一篇 »
5条记录访客评论
有点复杂的软件
Post by 废铁价格 on 2012, April 3, 8:31 AM  #1
#1
这个状态挺好哒
Post by 15CrMoG合金管 on 2012, March 9, 9:26 AM #2
这个挺难的怎么学都不会啊
Post by sy扫描器维修 on 2012, March 7, 9:11 PM #3
很专业啊 呵呵 学习下
Post by 西安条码打印 on 2012, January 31, 8:36 PM #4
抢沙发。。
Post by 回转支承 on 2012, January 5, 4:16 PM #5
发表评论




